

Learn about the GrabCAD Platform
Get to know GrabCAD as an open software platform for Additive Manufacturing
Visit our new homepage
Show off your skills and solve real design problems
NASA is turning to the 3D modeling experts in the community for ideas and designs to use or enhance the current state of modular robotic construction techniques.
Robotic building of structures in space is an active area of research for NASA and might prove to be a path towards sustainable and scalable space exploration. This technology is essential for establishing critical long-term orbital and Lunar surface infrastructure including power/communication towers, research stations, radiation shielding for habitats, and more.
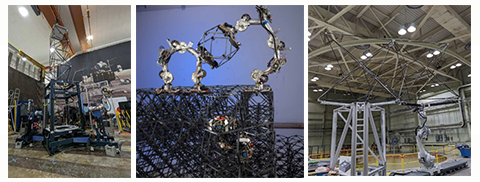
NASA Robotic Assembly Projects (TLT, ARMADAS, PASS)
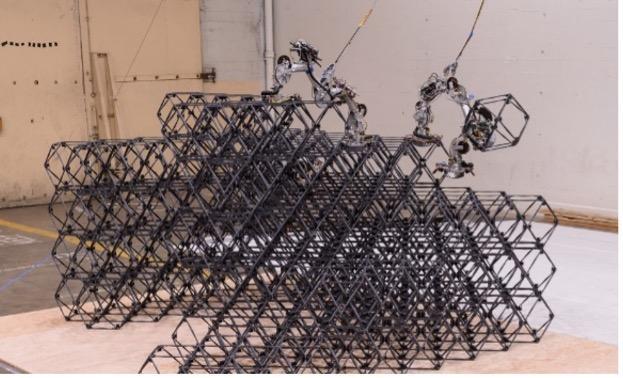
Recent efforts within NASA’s Robotic Assembly Community (e.g., ARMADAS, PASS, TLT, VSAT) have developed modular structural elements and multi-agent robot systems for building complex lightweight structures, telescope array backbones, and tall towers in space. The teams have demonstrated the potential of these construction methods by building various structures with assembly agents ranging in complexity from astronaut assembly to teleoperated robotic arms to fully autonomous multi-agent systems. These structures will need to be outfitted (i.e., sub-system integration) for functionality, including power, data, fluid, gas, and other utility lines, solar panels, insulation blankets, other functional modules, and more.
The long-term goal is to have a robust and growing tool kit of structural units, functional modules, and robotic agents to help build the future of space exploration.
The Challenge:
Equipped with a set of basic building blocks and robotic agents, participants are challenged to accomplish the following tasks (chose one or both areas to focus on):
The challenge is left intentionally broad to encourage participants to think big and creatively! The bigger and crazier the concepts, the better. The more detailed and feasible, the better!
Assumptions:
- A reliable logistic supply system of building materials is available wherever your ConOps is based.
- Mission design can consider various starting scenarios such as: earth launch, LEO supply station for structures, or ISRU capability implemented on lunar surface.
- A multitude of robotic agents of various types and their support infrastructure are available wherever your ConOps is based.
- The co-design of structure, robotic agents, and outfitting capability can be leveraged to greatly reduce the robotic complexity and increase reliability of a system.
- Low mass and volume are essential qualities for effective space systems.
- Participants will be able to choose to start from a blank slate to design a system or leverage existing robotics/structures work within NASA to accomplish their task.
References:
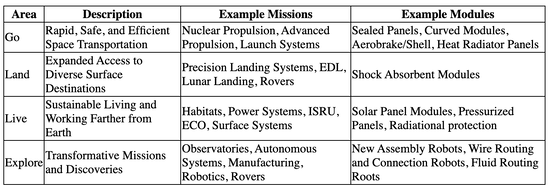
NASA Thrusts
Deliverables:
1. Mission Concept Design: Any CAD Models relevant explanations and analysis on design choices.
2. Assembly/Outfitting System Technology Development: CAD Models and any relevant explanations and analysis on design choices.
Background:
How can we efficiently assemble and outfit science- and exploration-enabling structures like power systems and radiation shields on the Moon and Mars, interplanetary transit vehicles, or the next generation of large diameter observatories? How do we ensure all the functional utilities (e.g., power, communication, fluids, etc.) are safely and effectively routed within those structures, and are there modular techniques for doing so that would enable maintenance, repair, and upgrades?
NASA is working on autonomous assembly and construction of sustainable modular space infrastructure. The agency has developed various high performance structural modules that can be robotically assembled to create different types of structures. It is envisioned that these building blocks would serve as a framework and ecosystem that can be applied towards different mission needs.
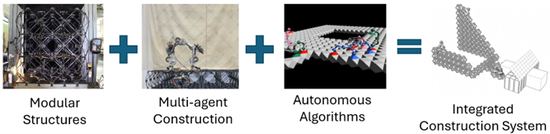
To add functionality and capability to a structural system, non-structural elements are needed to “outfit” a structure, meaning the capability to robotically provide utility connections, add new types of functional modules to a system is crucial to enabling a system of diverse capabilities. These assembly systems can typically be separated into 4 sub-systems; the modular structures, the assembly agents, the control system, and the outfitting system. Co-design of these systems together enable a high performing integrated construction system.
Major subsystems of a robotic construction system
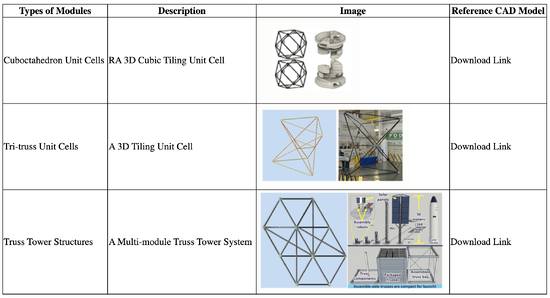
Structural Modules:
The are many types of structural modules that can be utilized to assemble a structure, participants are encouraged to use any of the example unit cell structures provided below, scaled to any size, as a starting point for their work. They may also choose to modify the unit cells to enable new capabilities or design new ones. Modules can be updated for better packing/handling/assembly/versatility, modified connection points or joining methods for robotic agents, etc. Participants must justify changes in mass, system complexity, etc. against the baseline design for the challenge and explain why the modified design is more effective for completing the assembly and outfitting tasks of this challenge.
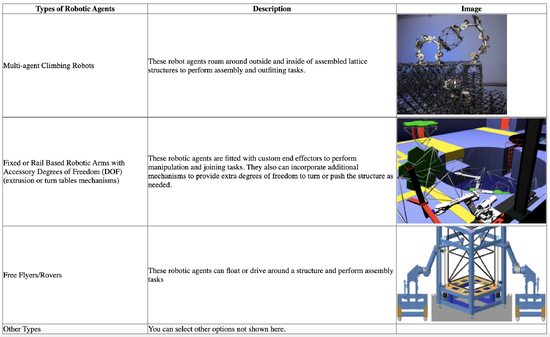
Robotic Agents:
Many types of robotic agents have been designed to assemble structures, and they all have their use cases, advantages, and disadvantages. You can assume for this exercise that the infrastructure is in place to support operations of these agents but should justify and explain their operations.
Control System:
The control systems consist of autonomous algorithms and software to help control multi-agent systems and adapt to changing conditions. It is not in the scope of this challenge.
Outfitting System:
The current generation of robots excel at building modular structures current generation of robots excel at building modular structures from a basic set of components but do not have the capability to add the wiring or conduits that will need to be installed to outfit the structures for operational use. When supplied with a set of basic building blocks, specialized robotic agents can autonomously assemble large structures. Currently the ARMADAS project has developed inchworm type robots for installing cables, and the PASS project has developed algorithms for routing cables using serial manipulators and soft continuum robots.
Now the challenge is to demonstrate the installation of modular electrical connections and piping for utilities like fluids and gases using robotic manipulators. Cabling and piping should follow the same modular architecture where a basic set of components can be installed and connected to transport electricity, data, fluids, and gases using robotic systems. Installation of new functional modules that add capabilities such as interfacing with uneven terrain, connection of payloads, paneling to a system will also need to be developed. Simple and effective connection points will be a key feature in that they must be robust and allow robotic connections. Submitters can focus on the individual components that can be installed and connected robotically or they can focus on the robotic system that installs them.
An example design reference mission for outfitting could be a tower with vertical solar arrays on the Lunar surface. After the tower is constructed from modular structural elements, electrical power cables must be routed to the panels so the energy can be distributed.
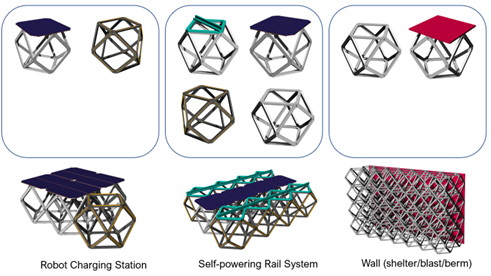
Example kit of modular structures and outfitting elements
Additional References:
For reference, NASA has developed a set of technology shortfalls that need to be addressed to allow for a long-term human presence on the Moon and Mars. In the shortfall details, see examples below:
1. ID 1540 (Intelligent Robots for the Servicing, Assembly, and Outfitting of In-Space Assets and Industrial-Scale Surface Infrastructure)
2. ID 513 (Robotic Assembly and Construction of Modular Systems for Sustained In-Space Infrastructure)
3. ID 617 (On-surface robotic assembly of vertical structures)
4. ID 1400 (On-surface robotic assembly of horizontal structures)
5. ID 1480 (On-surface Outfitting of Lunar Structures)
Note these shortfalls are in early development and will likely change often.
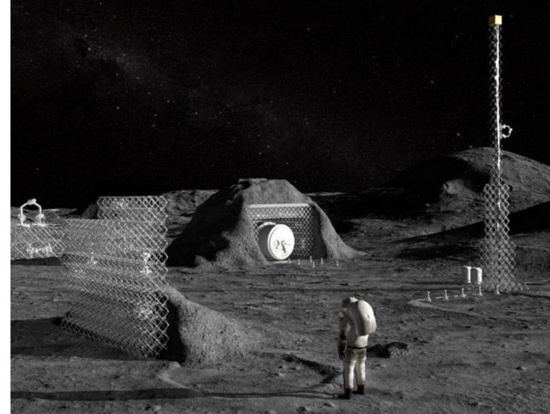
Example application of robotic assembly used to create Lunar surface infrastructure
Intellectual Property:
The Government is seeking a full government purpose usage license from monetary prize winners for further development of the concept. It is hoped that the winning concepts can be included in a follow-on effort to advance modular construction technology in support of future Artemis missions.
Copyright Stipulations:
- All material (including the CAD model itself and all written documents) must be free of any copyright restrictions.
- Use only models, photos, or images created during the project unless you have obtained the right from the copyright owner for unrestricted use – do not blindly copy images from internet websites.
- Images on .gov websites are often (but not always) public data; check before assuming.
- Include documentation of any usage permissions
CAD Files for Download:
CAD Files Zip
Project Owner(s):

Greenfield Trinh, Co-Project Manager
NASA Ames Research Center
Jessica Friz, Co-Project Manager
NASA Langley Research Center
Judging criteria
Mission Concept Design
Validity: What capabilities for human exploration and science are enabled with the con-ops you’re designing? Elaborate on the pros and cons of the con-ops.
Credibility: Is the design credible and could it be effective in assembling/outfitting modular structures? Develop KPPs, metrics, cost analysis tools, and/or any other relevant analysis for conducting such missions. For example, how do we improve each phase of the mission to make it more cost effective?
Feasibility: Are there any technology barriers that would prevent the concept from being built and tested? What are the limiting factors?
Clarity: Is the operation of the concept described clearly (e.g., pictures of the system from CAD)? Describe the different phases of the mission in your con-ops (e.g., launch from Earth, LEO supply station, Lunar orbit stations, ISRU station on the Lunar surface).
Bonus: Can this design apply to multiple applications? Scalability and economics of a system are important considerations.
Assembly/Outfitting System Technology Development
Demonstrate methods for robotically routing/connecting utility lines (e.g., electrical, data, fluid, or gas) through the provided modules.
Validity: Must demonstrate how the robotic agent(s) would complete the assembly/outfitting task justify the effectiveness of this choice. Weigh the pros and cons of specialized robotic agents versus COTS agents.
Feasibility: Considering the range and payload capacity of existing/COTS robotic agents, provide suggestions for the best agent(s) and tools/end effectors to use for this challenge or create a design for a new robotic agent.
Clarity: Is the concept described clearly (e.g. showing video of how the system operates)? Examples should be shown for routing utility lines through/around modules (e.g., unraveling, providing slack, and routing a wiring harness, ducting, tubing, etc.) or connecting utilities to modules (e.g., securing cables along the beams).
Develop new functional elements (e.g., surface interfaces, joints, mechanisms) to enhance assembly/outfitting of the provided modules.
Validity: Must demonstrate how the new functional element supports an assembly/outfitting task when using the provided modules.
Credibility: Is the design credible and could it be effective in assembling/outfitting modular structures? Must justify changes in mass, system complexity, etc. against the baseline module design for the challenge and explain why the modified design is more effective for completing the assembly and outfitting tasks of this challenge.
Clarity: Is the concept described clearly (e.g. showing videos/pictures of how the new design works). Show mock-ups in CAD, adjusting model geometry for better packing/handling/assembly/versatility, modified connection points or joining methods for robotic agents, etc. Show how these new elements support a particular outfitting task (e.g., attaching solar panels, cables, etc.).
Eligibility:
Solutions from countries listed as Type 1, 2, or 3 on the NASA Designated Countries List are Not eligible for monetary prizes. The list is frequently updated, and the latest version can be found here. This challenge is not open to NASA Personnel.
ENTERING THE COMPETITION The Challenge is open to everyone except employees and families of GrabCAD and the Sponsor. Multiple entries are welcome. Team entries are welcome. By entering the Challenge you: 1. Accept the official GrabCAD Challenges Terms & Conditions. 2. Agree to be bound by the decisions of the judges (Jury). 3. Warrant that you are eligible to participate. 4. Warrant that the submission is your original work. 5. Warrant, to the best of your knowledge, your work is not, and has not been in production or otherwise previously published or exhibited. 6. Warrant neither the work nor its use infringes the intellectual property rights (whether a patent, utility model, functional design right, aesthetic design right, trademark, copyright or any other intellectual property right) of any other person. 7. Warrant participation shall not constitute employment, assignment or offer of employment or assignment. 8. Are not entitled to any compensation or reimbursement for any costs. 9. Agree the Sponsor and GrabCAD have the right to promote all entries. If you think an entry may infringe on existing copyrighted materials, please email challenges@grabcad.com.
SUBMITTING AN ENTRY Only entries uploaded to GrabCAD through the "Submit entry" button on this Challenge page will be considered an entry. Only public entries are eligible. We encourage teams to use GrabCAD Workbench for developing their entries. Entries are automatically given the tag "NASARoboticAssemblyandOutfitting" when uploading to GrabCAD. Please do not edit or delete this tag. Only entries with valid tag will participate in the Challenge.
AWARDING THE WINNERS The sum of the Awards is the total gross amount of the reward. The awarded participant is solely liable for the payment of all taxes, duties, and other similar measures if imposed on the reward pursuant to the legislation of the country of his/her residence, domicile, citizenship, workplace, or any other criterion of similar nature. Only 1 award per person. Prizes may not be transferred or exchanged. All winners will be contacted by the GrabCAD staff to get their contact information and any other information needed to get the prize to them. Payment of cash awards is made through Checks mailed to the Winners. All team awards will be transferred to the member who entered the Challenge. Vouchers will be provided in the form of Stratasys Direct Manufacturing promo codes. We will release the finalists before the announcement of the winners to give the Community an opportunity to share their favorites in the comments, discuss concerns, and allow time for any testing or analysis by the Jury. The Jury will take the feedback into consideration when picking the winners. Winning designs will be chosen based on the Rules and Requirements schedule.
Schedule
This Challenge ends on September 9th 2024 at 11:59 Eastern Standard Time. Any Changes after the date will be considered as disqualifications.1st place: $1,250
2nd place: $750
Demonstrate methods for robotically routing/connecting utility lines (e.g., electrical, data, fluid, or gas) through the provided modules.
1st place: $1,250
2nd place: $750
Develop new functional elements (e.g., surface interfaces, joints, mechanisms) to enhance assembly/outfitting of the provided modules.
1st place: $1,250
2nd place: $750
Multi-functionality, multi-application, wild ideas!
Honorable Mentions (2x): $500
Project Sponsors
Name - Affiliation - Email
Greenfield Trinh - Ames Research Center - Greenfield.trinh@nasa.gov
Jessica Friz - Langley Research Center - jessica.s.friz@nasa.gov
All other jury
Name - Affiliation
Wilbert Ruperto-Hernandez, Langley Research Center
Mark Hilburger, Langley Research Center
Amy Quartaro, Langley Research Center
Julia Cline, Langley Research Center
Jacob Martin, Langley Research Center
Kenneth Cheung, Ames Research Center
Christine Gregg, Ames Research Center
Olivia Formoso, Ames Research Center
Frank Sebastianelli, Ames Research Center
James Gloyd Ames Research Center
Kara Latorella, Langley Research Center
Matthew Mahlin, Langley Research Center
John Cooper, Langley Research Center
Iok Wong, Langley Research Center
1st place: $1,250
2nd place: $750
Have an awesome idea for this competition? Want to win cool prizes? Sign-up now to upload your entries.

If you don't receive the email within an hour (and you've checked your Spam folder), email us as confirmation@grabcad.com.

17 comments
Nazarii Vareshchuk 25 days ago
I once thought about something similar. Of course, in the context of that competition, it was a technological joke, which was just a manifestation of fantasy.
But I'll just remind about it, maybe it will inspire someone.
SpaceBrick/MoonCraft
TARUN KUMAR DUTTA 22 days ago
I am very happy to see the new NASA Space Missions challenge,
CARLOS SEBASTIAN DI GIULIO 22 days ago
Hello, can I download the reference Cad models?
CARLOS SEBASTIAN DI GIULIO 22 days ago
Hola, no puedo descargar los modelos Cad de referencia, estan disponibles?
Greenfield Trinh 22 days ago
Note - you can download the CAD models via the link towards the bottom of the page (above the project owners section)
CARLOS SEBASTIAN DI GIULIO 22 days ago
thank you very much mr Greenfield
Greenfield Trinh 21 days ago
You're welcome. Looking forward to the submissions!
Luis Alberto Quispe Lozano 18 days ago
En hora buena... Será mi primer desafío.
TARUN KUMAR DUTTA 17 days ago
Respected NASA Projects Owner and Respected Jurys of the Challenges,
Thank so much for this challenge posting on grab cad, My self Tarun Kumar Dutta ( Diploma in Mechanical engineering in the year of 2006 , and with 17 to 18 years experience, and I had participated in last 3 of total NASA Challenges posted on Grabcad. Com, have some quarries/ Clarification regarding this challenges as following:
i) I have checked and study the given Challenges specification, description and link also , Please clarify the specifics requirements ,If is that modified / revised the Robotics structure assemble with reimaging/redeveloped the building block of the space large structure as well as on Moon , and mars robots and robotics structure, Please advice / clarify ,
ii) If possible please provide the environmental and geographical condition/description /Specification (ie Temperature, gas or any fluids velocity, land /surface condition / specification on Moon and Mars, etc, ) of Earth outer space orbit , and moon and mars , and also gravitational force,
iii) Application of the robotics structure , any load condition, and any preferred materials used to built those structure , or we will suggest , as per application,
iv) And specified the scope of design and drawing / 3D modeling of the challenges,
Please clarify the above points to start works , Thank you so much,
Have a Good Day,
Kind Regards,
Tarun Kumar Dutta
Nahuel Costa 16 days ago
Hello, Will the modules be reusable, or will they serve as a permanent fixed structure?"
Greenfield Trinh 12 days ago
@tarun
1. The structures are envisioned to be multi-functional and tailorable, so developing for general use is one goal.
2. We left this open for you to choose a target location.
3. We left this open for you to choose as well. You can choose to apply the technology to NASA Thrusts of Go Land Live and Explore. There are example missions and applications in the description.
4. This is also open ended. The challenge goal is to generate new ideas and apply the technology to different missions. Higher feasibility designs and details will be evaluated higher.
Hope that helps! This challenge is intentionally designed to be opened ended for you to choose. Scalability, multifunctionality, and economic viability are bonus considerations.
Greenfield Trinh 12 days ago
@nahuel
They are intended to serve as both depending on need.
Marcelo Valderrey 7 days ago
Hi everyone!
I shared two simplified models as a help for our designs (voxel and simplified ARMADA robot) but I have now removed the challenge tag from them so they don't get mixed up with the real entries. They will be available in my model library.
Kind regards!
Greenfield Trinh 1 day ago
Thank you for the additional resource Marcelo!
CARLOS SEBASTIAN DI GIULIO about 13 hours ago
Mr. Greenfield: @Greenfield
Question: Robots and manipulators can be controlled from planet Earth, online?
Greenfield Trinh about 13 hours ago
Hey Carlos. Yes, an Earth based control scenario is an option. But we would like to have as much of the system be autonomous as possible.
CARLOS SEBASTIAN DI GIULIO about 13 hours ago
thank you so much Mr Greenfield
Please log in to add comments.
Log in